We put space, science and technology topics on the big stage to make them understandable and accessible to everyone
By loading the video, you agree to Vimeo's privacy policy.
Learn more
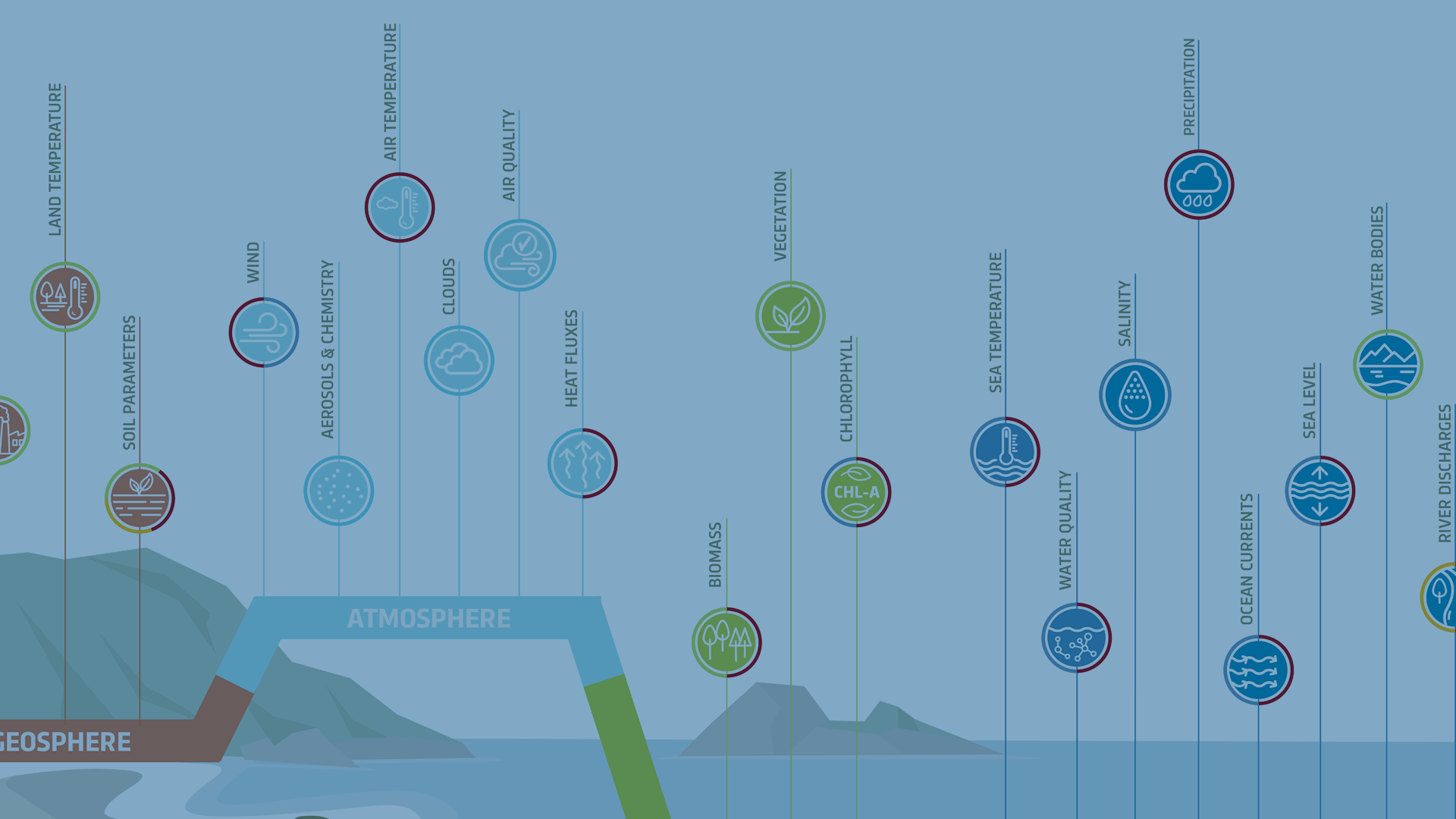
Crafting 'In a Nutshell'Infographics forEarth Observation Data
In the realm of infographics, the concept of 'data in a nutshell' implies presenting information that is clear, concise, and offers valuable insights without inundating the audience with unnecessary details. Explore our approach here.
Explore more
D&D
Management
Sebastian D. Marcu
Björn Brockmann